بازدید کننده محترم ، این سایت به همراه دامنه ، با سامانه مدیریت محتوا (CMS) دروپال Drupal با کلیه امکانات ، واگذار می شود . در صورتی که فعالیت های شغلی یا کسب و کار مرتبط دارید برای نقل و انتقالات دامنه و وب سایت به شکل کامل با شماره تماس 09388760510 یا 09126116240 تماس بگیرید و در صورت عدم پاسخگویی در تلگرام یا واتس آپ پیام بگذارید .
اطلاعات کلی :
نام دامنه : irinvent.ir
توضیح مفهوم دامنه : ir مخفف iran (ایران) – invent = اختراع
نام سایت : مرجع ابداعات و اختراعات ایران
مدل فعالیت : درج ابداعات و اختراعات داخلی ، اطلاع رسانی برای تامین کالا یا خدمات ابداعی ، ثبت نام مخترعین و مبتکرین برای تبلیغات محصول و خدمات نوآورانه ، نشریه الکترونیکی ادواری معرفی ابداعات ، شرکت در نمایشگاه ابداعات و اختراعات سالیانه بنیاد ملی نخبگان و انجمن مخترعین ایران و ... و ارائه گزارش از اختراعات موجود
مدت زمان اعتبار دامنه : 29-01-2020 مصادف با چهارشنبه، ۹ بهمن ۱۳۹۸
قدمت دامنه : 8 سال (زمان ثبت اولیه : 2011-01-15 مصادف با شنبه، ۲۵ دی ۱۳۸۹)
روبات هایی که با wifi پشت موانع را می بینند
همانطور که روز به روز اخبار را دنبال مي کنيد متوجه شده ايد که روبات ها روز به روز پيشرفته تر مي شوند و به هوشمندي و کارايي شان افزوده مي شود تا جايي که روبات ها قادرند چيزهايي که ما نمي بينيم هم ببينند. اين روبات ها توسط تيم کاري در دانشگاه کاليفرنيا ساخته شدند،Santa Barbara مي تواند تنها با استفاده از سيگنال هاي واي-فاي پشت ديوارهاي جامد را ببيند. اين روبات ها با استفاده از برنامه هايي جستجو و نجات، تجسس، رديابي و باستان شناسي مي توانند نقشه ي موقعيت اشياي ناديده را در يک ساختار پوشيده طراحي کند، سپس ترکيب آن ها را به به طبقات فلز، چوب يا گوشت دسته بندي نمايد.
روبات هايي که با wifi پشت موانع را مي بينند
همانطور که روز به روز اخبار را دنبال مي کنيد متوجه شده ايد که روبات ها روز به روز پيشرفته تر مي شوند و به هوشمندي و کارايي شان افزوده مي شود تا جايي که روبات ها قادرند چيزهايي که ما نمي بينيم هم ببينند. اين روبات ها توسط تيم کاري در دانشگاه کاليفرنيا ساخته شدند،Santa Barbara مي تواند تنها با استفاده از سيگنال هاي واي-فاي پشت ديوارهاي جامد را ببيند. اين روبات ها با استفاده از برنامه هايي جستجو و نجات، تجسس، رديابي و باستان شناسي مي توانند نقشه ي موقعيت اشياي ناديده را در يک ساختار پوشيده طراحي کند، سپس ترکيب آن ها را به به طبقات فلز، چوب يا گوشت دسته بندي نمايد.
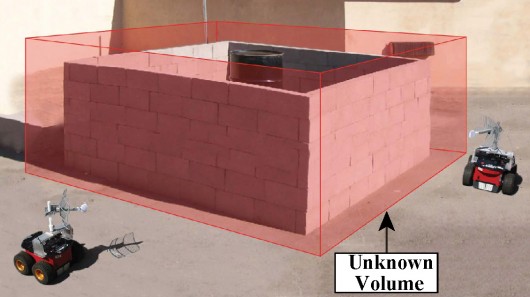
روبات ها به صورت جفتي کار مي کنند و ميدان يک شيء يا ساختار آن را به صورت افقي رسم نموده و سيگنال هاي راديويي واي-فاي را بين خود و از طريق شيء ديده شده دريافت مي کنند.
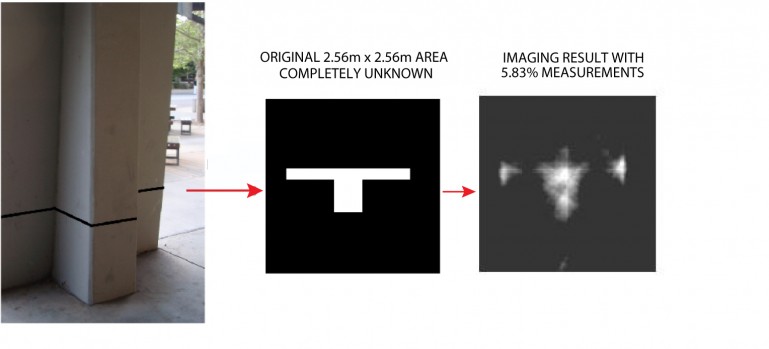
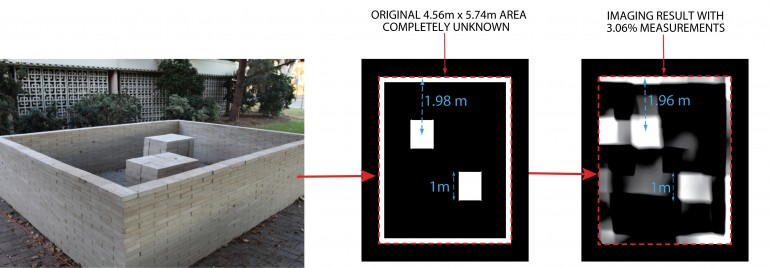
با استفاده از تفاوت ها ي قدرت سيگنال هاي واي-فاي جهت نشان دادن اشياي مخفي، سيستم مدل انتشار امواج را با رزولوشن هدف 2سانتي متر (0.8 اينچ) را به کار مي گيرد. با اندازه گيري قدرت هاي ميدان به دست آمده از اين انتقال دهنده هاي وايرلس روبات ها مي توانند نقشه ي صحيحي از ساختار کامل اشياي جامد را در فضاهايي که قرار گرفته اند طرح کند.
اگرچه اين اولين روباتي نيست که قادر به ديدن اشياي پشت بتون و آجر است، روبات تجسسCougar20-H نيزچند سال پيش به آن دست يافته بود؛ سيستم هاي ديگر بر دامنه گيگاهرتز حسگر راديويي با قدرت بالا تکيه مي کنند که سيستم هاي اساسي رادار پيچيده هستند. به همين نحو، سيستم ثابت واي-فاي تهيه شده توسط MIT مي تواند حرکات را در پشت ديوار با استفاده از واي-فاي به عنوان انتقال دهنده و دريافت کننده شناسايي کند اما رزولوشن آن بدون توجه به طبقه بندي و شناسايي اشياءبراي شناسايي حرکت کم است.
اما روبات هاي UCSB به تنهايي وابسته به انتقال دهنده هاي راديويي واي-فاي هستند -که اگرچه هر دو قدرت کمي دارند و دامنه ي حرکت آن ها کمتر از ارايه هاي پرقدرت است- نشان مي دهند که پردازش سيگنال و محاسبه بايد امر مهمي در قابليت « ديد پرتو X» آن ها باشد. تيم سازنده مي گويد که در تجهيزات دريافت کننده ي خود و رايانه هاي محاسباتي از موج ضربه اي، نوسان کلي و فيلترهاي قلمرو فضايي استفاده کرده اند و الگوريتم SLAM را در محاسبات طراحي درحال جنبش به کار برده اند.
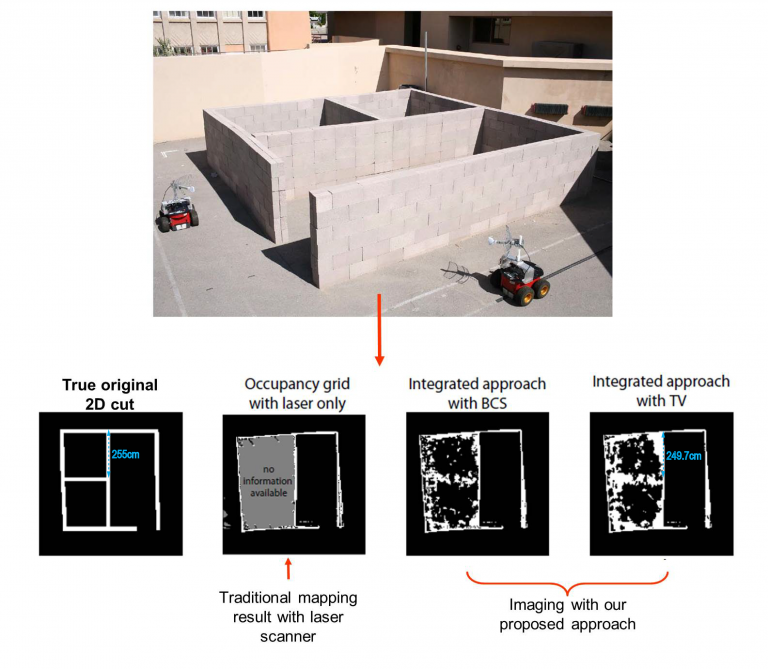
هر روبات موقعيت اصلي خود و روبات ديگررا براي تعيين مختصات ناحيه و فضاي شيء براساس سرعت تنظيم شده و فاصله ي حرکت با استفاده از گردش بين (ژيروسکوپ) و يک چرخ کدگذار براي موقعيت تخمين مي زند. درحاليکه مي تواند براي اندازه گيري دقيق مشکل باشد، روبات ها در حالت موازي و موزون در خارج از ناحيه اي حرکت مي کند مشابه سيستم هاي تصويربرداري پزشکي که در آن ها انتقال دهنده ي حرکت توسط يک گيرنده رديابي مي شوند. به طور واضح در توازن با آنتن سهمي شکل است که به هر روبات متصل شده است و اجازه ي رزولوشن مقبول تصوير را مي دهد.
محققان همچنين مي گويند که تکنيک هاي کاوش از طريق واي-فاي مي تواند بدون استفاده از روبات ها نيز صورت گيرد، با همکاري يک جفت انتقال دهنده/ گيرنده در ساختمان شناسايي جهت جستجوي متجاوزان کمين کرده در پشت ديوارها يا تعدادي از شناساگران فروسرخ يا حسگرهاي تجسس. اين قابليت را مي توان در يک دستگاه کوچک دستي نيز پياده کرد که بتواند اسکن بدن را جهت ارزيابي سلامت انجام دهد.
اين تيم به دنبال ساير برنامه هاي تصويربرداري است، مثل همکاري با ليزر جهت افزايش صحت فضايي و بهبود رزولوشن نقشه هاي عکس گرفته شده.
جدیدترین پست ها
-

کفشی که متناسب با سن کودکان...

NailO ریز تراشه ای همانند مو...
آیا می خواهید اختراع خود را معرفی کنید

اگر تمایل به معرفی اختراع و ایده خود دارید ، می توانید از قسمت ثبت اختراع ایده و اختراع خود را ثبت نمایید.



![]()
دانلود رایگان مجله اینترنتی